Modèles Integre-et-Tire et Modèles de Phase
Modèle d'Izhikevich, méthode d'Euler explicite (Forward Euler)
Les équations: $$C \frac{dv}{dt} = k ( v - vr ) ( v - vt ) - u + I,$$ $$\frac{du}{dt} = a( b ( v - vr ) - u ).$$ Si la variable $v$ atteint la valeur $v_{peak}$ au temps $t_{peak}$: $v(t) \to v_{peak}$ quand $t \to t_{peak}$, alors $v$ est remise à $v(t) = c$, et la variable $u$ est remise à $u(t)=u+d$.
Le modèle est paramétré de la façon suivante:
% parametres du modele
C=100; vr=-60; vt=-40; k=0.7;
a=0.03; b=-2; c=-50; d=100;
vpeak=35;
% parametres d'integration
T=1000; dt=1;
n=round(T/dt);
v=vr*ones(1,n); u=0*v;
I=[zeros(1,0.1*n),70*ones(1,0.9*n)];
% boucle principale: methode d'Euler
for i=1:n-1
% Integre (etape Euler)
v(i+1) = v(i) + dt * (k*(v(i)-vr)*(v(i)-vt)-u(i)+I(i))/C;
u(i+1) = u(i) + dt * a*(b*(v(i)-vr)-u(i));
% Tire (reinitialisation)
if v(i+1) >= vpeak
v(i) = vpeak;
v(i+1) = c;
u(i+1) = u(i+1)+d;
end
end
plot(dt*(1:n),v,'g');
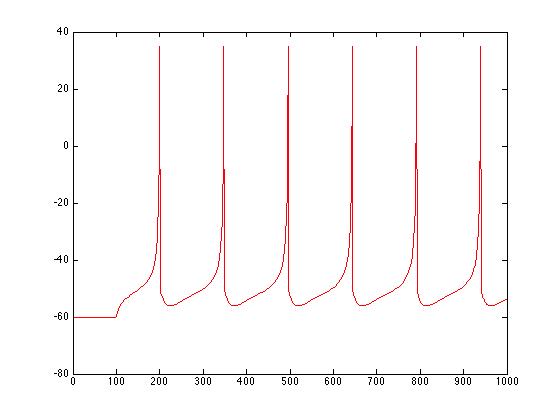
Modèle d'Izhikevich, méthode "Event Locator"
La fonction d'Izhikevich implémente le modèle intègre-et-tire avec la méthode "Event Locator".
sol = izhikevich;
Le code de la fonction izhikevich est
function sol = izhikevich
% IZHIKEVICH modele neurone integre-et-tire
% parametres des equations
C=100;
vr=-60;
vt=-40;
k=0.7;
a=0.03;
b=-2;
intensite = 70;
vpeak=35;
c=-50;
d=100;
% options de ode
% l'option 'Events' permet de gerer des evenements
% les ... permettent de continuer l'expression sur la ligne suivante
options = odeset('Events',@it_event, ...
'AbsTol',1e-6, ...
'RelTol',1e-3);
% conditions initiales
CI = [vr; 0];
% parametres de simulation
tfinal = 1000;
t0 = 0;
tout = t0;
xout = CI';
teout = [];
xeout = [];
while t0<tfinal
[t,x,te,xe] = ode45(@it,[t0 tfinal],CI,options);
nt = length(t);
% on accumule les solutions
tout = [tout; t(2:nt)];
xout = [xout; x(2:nt,:)];
teout = [teout; te];
xeout = [xeout; xe]; % on met a jour t0
t0 = t(nt); % on met a jour les CI
CI = [c; x(nt,2)+d];
end
% on affiche la solution pour v [x(1)]
plot(tout,xout(:,1),'r')
% on met la solution dans une structure de sortie
sol.t = tout;
sol.x = xout;
sol.te = teout;
sol.xe = xeout;
%--------------------------------------------------------
% Fonctions imbriquees
%--------------------------------------------------------
function dxdt = it(t,x)
% IZ equations EDO
v=x(1);
u=x(2);
dxdt = [(k*(v-vr).*(v-vt)-u+input_current(t))/C;
a*(b*(v-vr)-u)];
end
function I = input_current(t)
% INPUT_CURRENT courant applique a la membrane
I = intensite * ( t>=(0.1*tfinal) );
end
function [value,isterminal,direction] = it_event(~,x)
% IZ_EVENT detecte les evenements
value = x(1)-vpeak;
isterminal = 1;
direction = 1;
end
end
Modèle de phase
On peut identifier un point sur un cycle limite avec une phase, entre 0 et $2 \pi$.
Le modèle de phase le plus simple, représente en coordonnees polaires est
$$\frac{d\phi}{dt} = f(\phi),$$ si $\phi >= 2 \pi$, alors $\phi=0$ avec $f(\phi)$ (strictement) positive.La phase est discontinue, mais, représentée en coordonnées cartésiennes, on obtient une hauteur $y = \sin(\phi)$ continue. Pour compléter, on peut tracer le portrait de phase avec $x = \cos(\phi)$ et $y = \sin(\phi)$.
Modèle de phase avec relaxation
En plus de la phase, on peut inclure l'amplitude comme variable dynamique. Cette deuxieme variable, $r$, est positive et est régie par l'équation
$$\frac{dr}{dt} = g(r,\phi).$$L'équation de phase devient dependante de l'amplitude $$\frac{d\phi}{dt} = f(r,\phi).$$ si $\phi >= 2 \pi$, alors $\phi=0$
On obtient alors, en coordonnees cartesiennes, $$x = r \cos(\phi),$$ $$y = r \sin(\phi).$$
Exercice 1
Comparez les solutions du modèle d'Izhikevich obtenues avec la methode
d'Euler et la methode 'Event Locator'.
Quelle methode est la plus precise? Comment s'assurer que la solution obtenue est precise?
Comparez les temps d'execution de chaque methode. Variez le pas de temps
dt et les les parametres AbsTol et RelTol.
Exercice 2
En utilisant la methode de resolution de votre choix, tracez le portrait de phase du modèle d'Izhikevich (tracez u contre v). Localisez les points de discontinuite.
Exercice 3
Codez une methode pour resoudre l'équation de phase suivante: $$\frac{d\phi}{dt} = \omega (1.01+\sin(\phi)).$$
Utilisez le parametre omega=1.0, la condition initiale CI = 0.0,
pour des temps entre 0 et 200. Pour la methode numerique, inspirez-vous,
c.-a-d. copiez et modifiez, une des deux methode
pour le modèle d'Izhikevich.
Tracer la solution en coordonnees cartesiennes.
Utilisez la fonction comet pour tracer la trajectoire dans le plan de phase (x,y).
Exercice 4
a) Codez une methode pour resoudre l'équation de phase suivante:
$$\frac{dr}{dt} = - \lambda (r-A),$$ $$\frac{d\phi}{dt} = \omega.$$avec les paramètres lambda = 0.001,
0.01, 0.1, A = 1, et
omega = 2*pi/100, pour t entre t = 0 et t = 1000.
Resolvez pour des conditions initiales phi0 = 0, r0 = 0.1, 1.0, 2.0.
Tracer les solutions en coordonnees cartesiennes.
b) Modifiez les équations pour inclure un terme de forcage dans la direction des x en coordonnees cartesiennes:
$$\frac{dr}{dt} = - \lambda (r-A) + F \cos(\phi) \cos\left(\frac{2 \pi}{T} t\right),$$ $$\frac{d\phi}{dt} = \omega - \frac{1}{r} F \sin(\phi)\cos\left(\frac{2 \pi}{T} t\right).$$avec T = 50, 100, 200, et F assez petit.
Exercice 5
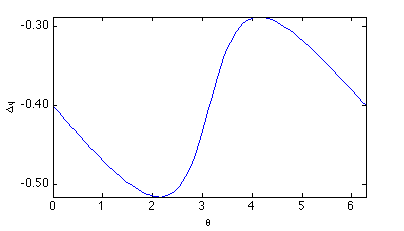
Courbe de réponse de phase (Phase-response curve (PRC))
Une courbe de réponse de phase indique le décalage de la phase d'un oscillateur soumis à une perturbation en fonction de la phase à laquelle il reçoit la perturbation.
En reprenant l'oscillateur de phase avec relaxation, étudiez la courbe de réponse de phase avec perturbation $\xi(t,\theta) = \xi_0 \delta(t-\theta)$ (delta Dirac) dans la direction de l'axe des $x$.