Michel Mizony, IGD
Institut Girard Desargues (UMR 5028 CNRS), Université lyon 1Un exemple de mécanique qui pose question
Sur la problématique de l'oscillateur harmonique (pendule simple ou
ressort). Plaçons-nous dans le contexte d'un des plus simples des systèmes
mécaniques : celui du système masse-ressort idéal, à petites oscillations,
soumis à une force extérieure F(t). L'équation du mouvement de la masse est
traditionnellement écrit sous la forme
![]() , ou K est
une
constante associée au ressort. Expérimentalement les mécaniciens se sont
vite aperçus qu'il existait un terme complémentaire en x , appelé force de
" frottement " plus précisément force de dissipation, du fait qu'il est
proportionnel à la vitesse, et ce bien qu'il n'existe aucune source de
frottement. On a donc l'équation
, ou K est
une
constante associée au ressort. Expérimentalement les mécaniciens se sont
vite aperçus qu'il existait un terme complémentaire en x , appelé force de
" frottement " plus précisément force de dissipation, du fait qu'il est
proportionnel à la vitesse, et ce bien qu'il n'existe aucune source de
frottement. On a donc l'équation
![]() ,
où
,
où ![]() est bien mesuré.
Mais des expériences plus fines, lors d'études sur l'amortissement en régime
transitoire rapide, montrent qu'il faut remplacer ce coefficient
est bien mesuré.
Mais des expériences plus fines, lors d'études sur l'amortissement en régime
transitoire rapide, montrent qu'il faut remplacer ce coefficient
![]() par une fonction
par une fonction
![]() ; et le coefficient
; et le coefficient
![]() commence à être bien mesuré. Le problème est donc le suivant :
Soit
commence à être bien mesuré. Le problème est donc le suivant :
Soit
![]() cette équation du mouvement,
comment obtenir théoriquement cette fonction
cette équation du mouvement,
comment obtenir théoriquement cette fonction ![]() .
Question ouverte, mais importante. En effet, il est une expérience que l'on
fait souvent, celle de constater que la plupart des pannes mécaniques
interviennent pendant la mise en route ou lors de l'arrêt d'un système.
Peut-on limiter les sources de ces pannes qui proviennent lors d'un
changement de régime brutal (changement de régime modélisé par notre force
extérieure
.
Question ouverte, mais importante. En effet, il est une expérience que l'on
fait souvent, celle de constater que la plupart des pannes mécaniques
interviennent pendant la mise en route ou lors de l'arrêt d'un système.
Peut-on limiter les sources de ces pannes qui proviennent lors d'un
changement de régime brutal (changement de régime modélisé par notre force
extérieure ![]() , par exemple de la forme
, par exemple de la forme ![]() . Il semble important
de connaître
. Il semble important
de connaître ![]() en fonction de F, pour mieux comprendre certaines
causes de
pannes. En régime normal, on sait qu'il suffit d'éviter des plages de
résonances, mais le problème reste incompris en régime transitoire
(démarrage, arrêt, ou ... panne secondaire qui perturbe soudainement le
régime normal). De fait avec des collègues de l'INSA de Lyon (Ahmad Al Majid
et Régis Dufour) nous avons cette année trouver un premier résultat, i.e. la
piste de modélisation qui semble bonne à l'épreuve des expérimentations ;
cette piste est basée sur le fait que le temps propre de la pièce mobile
n'est pas forcément celui des pièces fixes (autrement dit celui du
laboratoire), ce qui oblige à utiliser toute la théorie tensorielle de la
relativité générale. Même si les vitesses en jeu ne sont pas relativistes,
il se trouve que les phénomènes vibratoires liés à des régimes transitoires
rapides nécessitent de recourir au temps propre. C'est ce que viennent de
montrer Ahmad Al Majid et Régis Dufour du laboratoire de Mécanique des
Structures, UMR CNRS 5006 de l'INSA de Lyon cf. [1], qui ont mis en évidence
l'existence d'un temps propre de la pièce mobile.
en fonction de F, pour mieux comprendre certaines
causes de
pannes. En régime normal, on sait qu'il suffit d'éviter des plages de
résonances, mais le problème reste incompris en régime transitoire
(démarrage, arrêt, ou ... panne secondaire qui perturbe soudainement le
régime normal). De fait avec des collègues de l'INSA de Lyon (Ahmad Al Majid
et Régis Dufour) nous avons cette année trouver un premier résultat, i.e. la
piste de modélisation qui semble bonne à l'épreuve des expérimentations ;
cette piste est basée sur le fait que le temps propre de la pièce mobile
n'est pas forcément celui des pièces fixes (autrement dit celui du
laboratoire), ce qui oblige à utiliser toute la théorie tensorielle de la
relativité générale. Même si les vitesses en jeu ne sont pas relativistes,
il se trouve que les phénomènes vibratoires liés à des régimes transitoires
rapides nécessitent de recourir au temps propre. C'est ce que viennent de
montrer Ahmad Al Majid et Régis Dufour du laboratoire de Mécanique des
Structures, UMR CNRS 5006 de l'INSA de Lyon cf. [1], qui ont mis en évidence
l'existence d'un temps propre de la pièce mobile.
Remarque : bien des problèmes que l'on croit bien modélisés ne le sont pas.
En examinant les résultats expérimentaux, Ahmad est parti de l'idée simple qui consiste à se poser la question de savoir si le temps propre d'une pièce en mouvement était bien le même que celui de l'observateur fixe (expérimentateur). Aussi a-t-il introduit un tenseur métrique et trouvé des solutions telles que l'une des équations des géodésiques avait la forme théorique voulue. Une des solutions était même assez bonne du point de vue expérimental. Mais cette solution a un gros inconvénient, celui de paraître une solution ad hoc. Un traitement systématique s'imposait donc.
Sur le calcul tensoriel. L'on sait que pour assurer l'unicité de
solution pour un problème de gravitation, dans le cadre de la
relativité générale, il faut une jauge (des équations
complémentaires), cf. V. Fock par exemple. La jauge prise usuellement
est la jauge harmonique, souvent appelée ``système de
coordonnées harmoniques''. A part des justifications théoriques du
type le graviton est de spin 2, ou le mouvement d'un front d'onde
s'écrit très simplement, il n'y a pas encore à ce jour de
véritables vérifications de cette jauge.
A l'aide de la puissance des ordinateurs et de logiciels de Calcul
Formel (Maple), nous avons dans un premier temps cherché toutes les
2-métriques
![${\it g}=\left [\begin {array}{cc} \tau(t,x)&\,f(t,x)\\
\noalign{\medskip }f(t,x)&-h(t,x)\end {array}\right ]$](img11.png) telles que l'une des équations des
géodésiques soit de la forme voulue. Evidemment il y a beaucoup,
énormément de solutions.
Puis nous avons cherché celles qui de plus vérifient les
équations de la jauge harmonique. Le résultat est là, qui résiste
à l'expérimentation.
telles que l'une des équations des
géodésiques soit de la forme voulue. Evidemment il y a beaucoup,
énormément de solutions.
Puis nous avons cherché celles qui de plus vérifient les
équations de la jauge harmonique. Le résultat est là, qui résiste
à l'expérimentation.
Formulation tensorielle
Voici les résultats de calcul tensoriel (obtenus avec le logiciel
Maple) dont nous aurons besoin.
Soit ![]() , l'espace-temps de l'observateur qui regarde les
oscillations du système. Pour cet observateur la métrique est la
métrique canonique
, l'espace-temps de l'observateur qui regarde les
oscillations du système. Pour cet observateur la métrique est la
métrique canonique ![]() de Lorentz. Soit
de Lorentz. Soit ![]() la métrique
associée à la masse qui oscille. Prenons son écriture dans la
carte
associée à l'observateur; elle est de la forme
la métrique
associée à la masse qui oscille. Prenons son écriture dans la
carte
associée à l'observateur; elle est de la forme
![$ \left [\begin {array}{cc} \tau(t,x)&\,f(t,x)\\
\noalign{\medskip }f(t,x)&-h(t,x)\end {array}\right ]$](img15.png) .
Mais pour obtenir des équations ``simples'', il est pratique de la
prendre sous la forme
.
Mais pour obtenir des équations ``simples'', il est pratique de la
prendre sous la forme
![${\it g(t,x)}=h(t,x)\left [\begin {array}{cc} \tau(t,x)&1/2\,f(t,x)\\ \noalign{\medskip }1/2\,f(t,x)&-1\end {array}\right ]$](img16.png) ,
avec pour conditions initiales au point
,
avec pour conditions initiales au point ![]() :
:
![${\it g(0,0)=grr(0,0)=\left [\begin {array}{cc}
1&0\\ \noalign{\medskip }0&-1\end {array}\right ]}$](img18.png) , (absence de
force extérieure
, (absence de
force extérieure ![]() ). Pour une 2-métrique le tenseur d'Einstein est
toujours identiquement nul, ce qui correpond au cadre expérimental
(les forces de gravitations s'exercant sur la pièce mobile sont négligeables).
). Pour une 2-métrique le tenseur d'Einstein est
toujours identiquement nul, ce qui correpond au cadre expérimental
(les forces de gravitations s'exercant sur la pièce mobile sont négligeables).
Une des équation du mouvement peut se mettre sous la forme :
Ecrivons maintenant les deux équations provenant de la jauge
harmonique écrites de manière
![]() -covariante : elles s'obtiennent en calculant :
-covariante : elles s'obtiennent en calculant :
![]() où
où ![]() est la dérivation covariante par rapport à la
métrique plate
est la dérivation covariante par rapport à la
métrique plate ![]()
Lemme 1 : Les équations provenant de la jauge harmonique sont:
D'après ce lemme 1, pour ![]() telle que
telle que ![]() et
et ![]() , alors
la métrique
, alors
la métrique ![]() s'écrit :
s'écrit :
théorème 1 :
![\begin{displaymath}{\it g(t,x)}=h(t,x)\left [\begin {array}{cc}\dot {u}(t,x) &1/...
...'(t,x)\\ \noalign{\medskip }1/2\,u'(t,x)&-1\end {array}\right ]\end{displaymath}](img29.png)
Il ne reste plus qu'à résoudre cette équation pour
déterminer
![]() (et par suite
(et par suite ![]() ).
Pour cela, posons
).
Pour cela, posons
![]() .
Alors l'équation (*) se réduit au système d'équations
.
Alors l'équation (*) se réduit au système d'équations
Lemme 2 : pour ![]() :
:
Formulation Lagrangienne
Il est évidemment tentant de poser tout de suite ![]() et
et
![]() ; et de fait dans le processus
de résolution du problème, c'est bien ce que nous avons fait, avant de
mettre en évidence les résultats ci-dessus. Mais restons dans un cadre général,
en examinant la formulation Lagrangienne du problème.
; et de fait dans le processus
de résolution du problème, c'est bien ce que nous avons fait, avant de
mettre en évidence les résultats ci-dessus. Mais restons dans un cadre général,
en examinant la formulation Lagrangienne du problème.
Le Lagrangien classique est
En résumé, le cadre Lagrangien nous donne rapidement l'équation fondamentale du mouvement et le cadre de la relativité générale les équations supplémentaires nécessaires, à partir des équations de la jauge harmonique.
Résultats pour l'oscillateur harmonique
Revenons dans la situation de l'expérimentation faite; les vitesses (![]() )
sont très petites, aussi nous allons négliger les termes en
)
sont très petites, aussi nous allons négliger les termes en ![]() dans
les équations (1) et (2) tout
simplement en prenant
dans
les équations (1) et (2) tout
simplement en prenant ![]() et en posant
et en posant
![]() .
.
L'équation du mouvement se réduit à
Corollaire :
Sous l'hypothèse de la jauge harmonique, l'équation
différentielle du mouvement de l'oscillateur harmonique contient un terme
d'amortissement (ou de dissipation) dont le coefficient
![]() admet le développement limité à
l'ordre 4 suivant lorsque
admet le développement limité à
l'ordre 4 suivant lorsque ![]() et
et
![]() :
:

La preuve ne pose pas de difficultés, mais pour les calculs pénibles il est intéressant de recourir à un logiciel de calcul formel.
Voici ce que donne la confrontation à l'expérimentation (réalisée par
A. Al Majid à l'INSA de Lyon).
Pour les figures ![]() est noté
est noté
![]() .
.
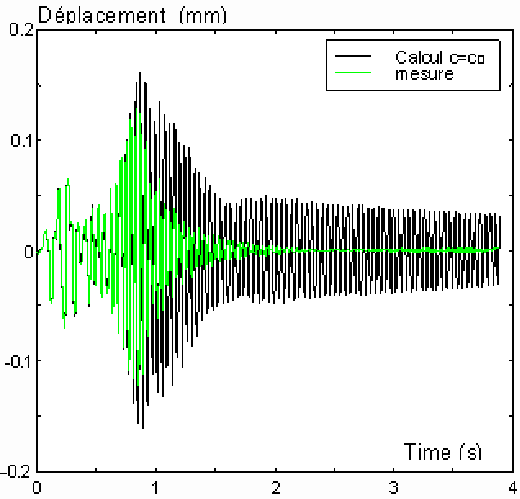
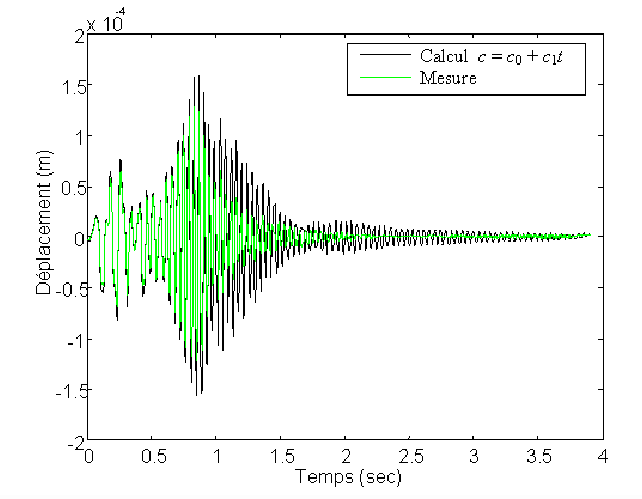
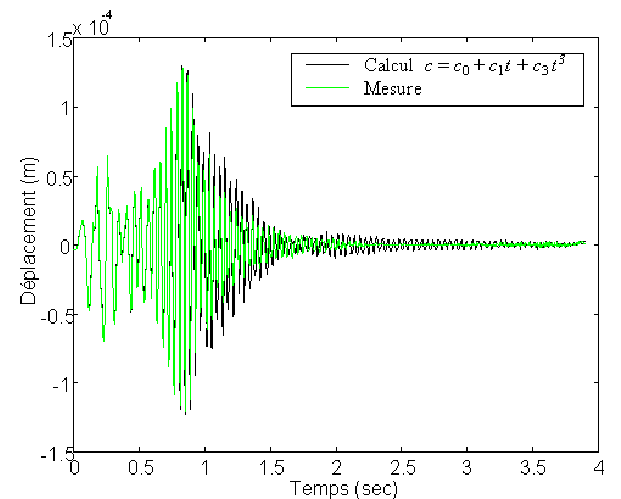
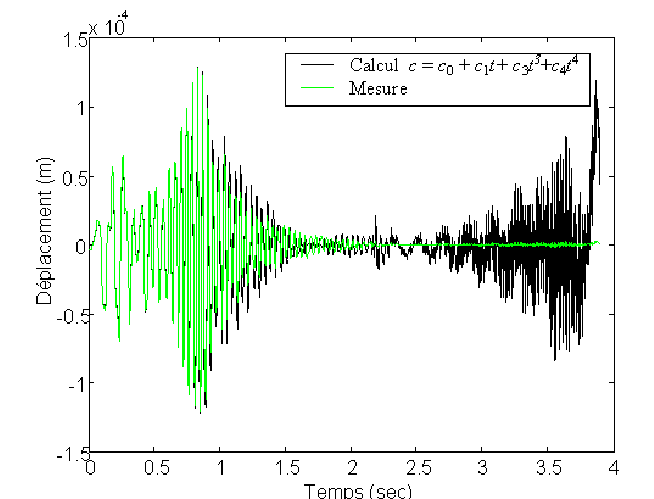
Il est manifeste que l'adéquation entre la courbe expérimentale et la courbe
théorique augmente avec l'ordre du développement limité. A l'ordre suivant
cette adéquation est encore meilleure dans un premier temps, puis se manifeste
sans doute un problème d'instabilité dans la résolution numérique.
Remarques en vrac
1- Au niveau de la confirmation expérimentale, les premiers
résultats sont probants, mais ils restent à les conforter.
La question de la compréhension de ce
coefficient de dissipation ![]() à travers le concept de
temps propre reste à approfondir. De fait, dans le cadre d'un régime
transitoire rapide, l'amortissement peut être modélisé comme
phénomène métrique.
à travers le concept de
temps propre reste à approfondir. De fait, dans le cadre d'un régime
transitoire rapide, l'amortissement peut être modélisé comme
phénomène métrique.
2- Il reste à comprendre pourquoi la jauge harmonique
est essentielle pour de simples problèmes de mécanique. Est-ce lié
au fait que la force extérieure se transmet à la vitesse de la
lumière, ou plus profondemment à une invariance du mouvement de
tout ``front d'onde'' dans la terminologie de Vladimir Fock ?
3- On sait que le groupe de Poincaré est fondamental au niveau
de la relativité restreinte et générale, ainsi qu'au niveau de
la mécanique quantique, pourquoi ne jouerait-il pas un rôle à
l'échelle intermédiaire de la mécanique usuelle ? En fait la
jauge harmonique possède un rapport étroit avec ce groupe de
Poincaré.
4- Relativisons. Ceci n'est évidemment qu'un début, et pour
plusieurs raisons :
la constante K n'est constante qu'à une première approximation;
les mouvements de l'oscillateur sont supposés petits;
nous avons regardé un problème à
une seule dimension spatiale; enfin nous avons supposé que le coefficient
de dissipation ![]() ne dépend que de t (en négligeant l'aspect
relativiste des vitesses).
ne dépend que de t (en négligeant l'aspect
relativiste des vitesses).
5- Au risque de me répéter, sans la puissance de calcul des
ordinateurs, et celle du logiciel ``Maple'', je n'aurais pas pu trouver
que la forme à adopter pour le tenseur métrique soit :
![${\it g(t,x)}=
\left [\begin {array}{cc} \tau(t,x)h(t,x)&1/2\,f(t,x)h(t,
x)\\ \noalign{\medskip }1/2\,f(t,x)h(t,x)&-h(t,x)\end {array}\right ]$](img63.png) .
.
6- Une certitude : pour espérer traiter de manière similaire l'étude de
phénomènes vibratoires dans le plan ou l'espace, on ne peut pas faire
l'économie de la traduction de la jauge harmonique dans le cadre Lagrangien.
7- Une deuxième certitude : l'oscillateur harmonique nous fournit un test
d'un aspect de la relativité générale (celui de la pertinence de la jauge
harmonique), un test en laboratoire sur terre, de plus
extrèmement peu couteux financièrement, et renouvellant le problème de l'étude
de la limite entre mécanique classique et mécanique relativiste.
A. Al Majid et R. Dufour ``An Event Dimension for Modeling Damping Due
to Time-Varying Forcing Frequency'', in Nonlinear Dynamics, Kluwer
Academic Publishers, 2000.
A. Al Majid et R. Dufour : " Modelling damping effect due to high transient
motion using the Riemannian space " ; ASME, Pittsburg (Pennsylvanie),
Septembre 2001.
V.Fock, ``The theory of space, time and gravitation'', Pergamon
Press, 1961;
M. Mizony et G. Arsac ``Que peut nous apprendre la
gravitation sur l'espace-temps?'' preprint de l'Institut Girard
Desargues (UCBL), no 12, juillet 1998.
M. Mizony ``la relativité générale aujourd'hui'',
preprint du Laboratoire d'Analyse Fonctionnelle et Probabilités
(UCBL), no 12, octobre 1993.
