Le plan est supposé muni d'un repère orthonormé \( \left( O; \overrightarrow{i}, \overrightarrow{j} \right) \).
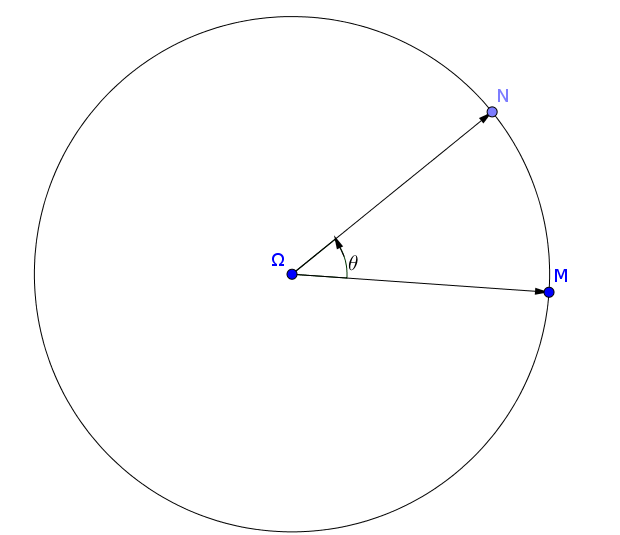
On appelle image du point M, par la rotation de centre \( \Omega \) et d'angle \( \theta \), le point N se trouvant sur le cercle de centre \( \Omega \) et de rayon \( \Omega M \) tel que l'angle orienté \( \left( \overrightarrow{\Omega M} ; \overrightarrow{\Omega N}\right) \) soit de mesure \( \theta \).
La définition en termes de coordonnées : \[ \begin{cases} x_N = x_{\overrightarrow{\Omega M}} \cos(\theta) - y_{\overrightarrow{\Omega M}} \sin(\theta) + x_{\Omega} \\ y_N = x_{\overrightarrow{\Omega M}} \sin(\theta) + y_{\overrightarrow{\Omega M}} \cos(\theta) + y_{\Omega} \end{cases} \]
D'où vient cette formule sur les coordonnées ?
Plaçons nous dans le cadre des connaissances de première : on suppose que \( \Omega = O \) est le centre du repère et que le cercle est de rayon 1. Le cercle est donc le "cercle trigonométrique".
Dans cette situation, vous savez que les coordonnées de M sont de la forme \( \left( \cos(\alpha) ; \sin(\alpha) \right) \) où \( \alpha \) est l'angle \( \left( \overrightarrow{i} , \overrightarrow{OM} \right) \) entre le premier vecteur de la base et le vecteur \( \overrightarrow{OM} \). C'est en effet ainsi que l'on définit en seconde et en première cos et sin.
On obtient ensuite le point N "en tournant d'un angle \( \theta \) à partir de la position du point M". Les coordonnées du point N sont donc \( \left( \cos(\alpha + \theta) ; \sin(\alpha + \theta) \right) \).
On voit par ailleurs, en première S, les formules de trigonométrie suivante : \[ \forall a\in\mathbb{R}\ \ \forall b\in\mathbb{R} \ \ \ \cos(a+b)= \cos(a)\cos(b)-\sin(a)\sin(b) \text{ et } \sin(a+b) = \sin(a)\cos(b)+\sin(b)\cos(a) \]
Les coordonnées du point N sont donc : \[ \begin{cases} x_N = \cos(\alpha)\cos(\theta) - \sin(\alpha) \sin(\theta) \\ y_N = \sin(\alpha)\cos(\theta) + \sin(\theta) \cos(\alpha) \end{cases} \] c'est à dire : \[ \begin{cases} x_N = x_M\cos(\theta) - y_M \sin(\theta) \\ y_N = y_M \cos(\theta) + x_M\sin(\theta) \end{cases} \]
Il reste à tenir compte du rayon (homothétie) et du centre (translation) pour obtenir la formule dans le cas général énoncé plus haut.