ANR-10-JCJC 0102
On commence par rappeler le contexte qui motive notre projet ANR en général et les résultats obtenus en particulier.
Les structures de contact sont des champs d’hyperplans qui apparaissent naturellement au bord de variétés holomorphes ou symplectiques sous certaines hypothèses de « convexité ». Sur le bord V d’un domaine convexe (au sens le plus élémentaire du terme) dans ℂn, le champ d’hyperplans considéré est la donnée, pour tout v dans V, de l’unique hyperplan complexe ξ inclus dans Tv V. D’un point de vue symplectique, on peut voir ξ comme le noyau de la restriction à V de ιX ω où ω est la forme symplectique standard sur ℂn et X est un champ de vecteurs radial transverse à V. Les notions de convexité holomorphe et symplectique sont des généralisations de cet exemple ne faisant intervenir que la structure holomorphe (resp. symplectique). Par exemple, on trouve des structures de contact à l’infini des variétés de Stein, les variétés complexes qui admettent un plongement holomorphe propre dans ℂn. On en trouve aussi sur le fibré cotangent unitaire d’une variété quelconque, en lien avec la structure symplectique de Liouville.
À dimension fixée, tous les champs d’hyperplans mentionnés ci-dessus sont localement isomorphes et on dispose d’une caractérisation simple de ce modèle local, indépendamment de l’existence d’une variété dont le bord porte le champ d’hyperplans. On peut donc définir les structures de contact « abstraitement » comme les champs d’hyperplans admettant ce modèle au voisinage de tout point. La figure 1 représente un modèle local en dimension 3.
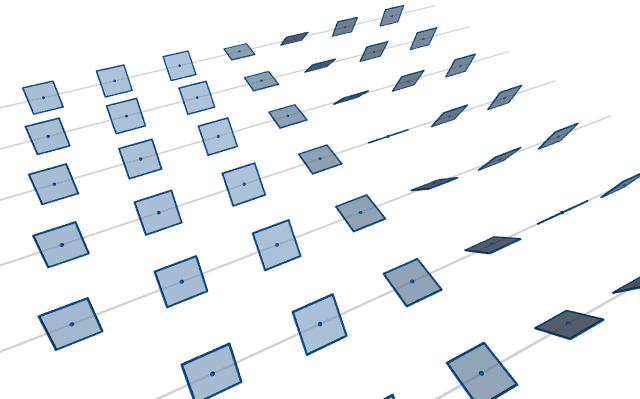 Figure 1: Modèle de structure de contact en dimension 3. Ce champ de plans est invariant par translation dans la direction qui n’est pas dessinée.
Figure 1: Modèle de structure de contact en dimension 3. Ce champ de plans est invariant par translation dans la direction qui n’est pas dessinée.
La topologie de contact est l’étude des propriétés globales de ces structures considérées modulo isomorphisme. Par isomorphisme entre ξ1 et ξ2, on entend un difféomorphisme de la variété ambiante qui pousse ξ1 sur ξ2. S’il existe un tel difféomorphisme qui est de plus homotope à l’identité alors on dit que ξ1 et ξ2 sont isotopes. Avant de discuter de propriétés possibles pour une classe d’isomorphisme ou d’isotopie de structures de contact, on note que chaque structure de contact est accompagnée d’une classe privilégiée de champs de vecteurs, appelés ses champs de Reeb. Dans le cas du fibré unitaire tangent, les flots géodésiques en sont des exemples. Plus généralement, on les trouve comme restriction d’un flot hamiltonien à tout niveau d’énergie vérifiant l’hypothèse de convexité adéquate.
La présentation ci-dessus fait émerger trois grandes questions (ou classes de questions) que l’on peut appeler primaires car elles découlent directement des définitions. Elles sont bien sûr toutes de nature globales puisque deux structures de contact en dimension fixée sont toujours localement isomorphes.
A priori, les trois questions ci-dessus sont complètement indépendantes. Cependant, les réponses sont étonnamment imbriquées —c’est un des charmes du domaine — et certaines classes de structures de contact ont des propriétés spéciales vis-à-vis des trois questions.
Le premier exemple de telle classe est apparu en dimension 3 dès la fin des années 80. On dit qu’une structure de contact en dimension 3 est vrillée si elle contient un disque vrillé, c’est à dire un disque plongé de sorte que son espace tangent coïncide avec la structure de contact le long du bord [Eli89]. Ces structures ne sont jamais remplissables, même faiblement [Gro85, Eli90]. Elles forment une classe de structures de contact flexibles: il n’y a aucune obstruction à leur existence et la restriction du foncteur d’oubli à cette classe n’oublie rien, c’est-à-dire que deux structures de contact vrillées qui sont homotopes parmi les champs de plans sont homotopes parmi les structures de contact [Eli89]. Enfin tout champ de Reeb d’une structure de contact vrillée admet une orbite périodique contractile [Hof93]. De plus, la démonstration de cette dernière propriété passe par la symplectisation de la variété de contact qu’on peut voir comme un cobordisme symplectique de la variété vers elle-même dans lequel les courbes (pseudo)-holomorphes, et donc la géométrie (presque)-complexe, jouent un rôle crucial.
Les structures de contact vrillées forment donc une classe très bien comprise et remarquablement homogène. Par contraste, la classe complémentaire, celle des structures dites tendues, est beaucoup plus mystérieuse et hétérogène. On sait en particulier que les structures de contact tendues sont rares [CGH09]. Elles sont parfois remplissables et parfois non [Eli96, EH02]. En général elles ne sont pas flexibles [Gir94] et elle peuvent admettre des champs de Reeb sans orbite périodique contractile.
Sur le tore T3 = ℝ3/ℤ3, on peut définir, pour chaque entier strictement positif n, la structure de contact
ξn = ker (cos(2nπ z) dx − sin(2nπ z) dy) .
Ces structures sont toutes tendues [Ben83] et :
Certaines propriétés apparaissant dans l’exemple précédent ont peu à peu reçu comme explication l’existence de « domaines de torsion de Giroux » : des plongements de tores épais T2 × [0, 2nπ] munis de la structure de contact ker(cos(z) dx − sin(z) dy). Ceux-ci permettent de définir la torsion de Giroux d’une variété de contact de dimension 3 comme le supremum des entiers n pour lesquels un tel plongement existe ou bien zéro s’il n’en existe aucun. Les structures vrillées sont toujours de torsion infinie, toute torsion non-nulle est une obstruction à la remplissabilité forte [Gay06] et, à torsion finie fixée, il n’y a sur chaque variété qu’un nombre fini de classes d’isomorphismes de structures de contact [CGH09].
Les notions de disque vrillé et de domaine de torsion sont très topologiques et sont définies directement à partir de la structure de contact en tant que champ de plans. Comme indiqué dans la question dynamique, une autre voie d’étude consiste à considérer les propriétés communes à tous les champs de Reeb d’une structure de contact donnée. En dimension quelconque, on dispose d’une théorie qui, bien que partiellement conjecturale à cause de problèmes techniques, décrit une façon de « compter » les orbites périodiques d’un champ de Reeb d’une façon qui ne dépende que de la structure de contact [EGH00]. Plus précisément, pour toute structure de contact ξ, on peut construire une algèbre, l’homologie de contact de ξ, définie à partir des orbites d’un champ de Reeb mais qui ne dépend que de ξ. Il s’agit d’une situation analogue à celle de l’homologie simpliciale d’une triangulation qui ne dépend que de la variété sous-jacente. L’homologie de contact est nulle dans le cas des structures de contact vrillées, ce qui est attendu puisqu’elles sont flexibles, mais elle n’est jamais nulle pour une structure de contact symplectiquement remplissable. Cette théorie permet par exemple de distinguer les structures de contact sur T3 décrites ci-dessus.
La topologie de contact en grandes dimensions est beaucoup moins bien comprise. La plupart des définitions et résultats rappelés ci-dessus concernent les structures de contact sur les variétés de dimension 3, à l’exception notable de l’homologie de contact. Le but principal de notre projet ANR est de comprendre quels phénomèmes s’étendent en grandes dimensions.
Giroux a proposé une définition de structure de contact vrillée basée sur la théorie des livres ouverts et Niederkrüger en a proposé une autre plus directement inspirée de la dimension 3 [Nie06]. Ces deux définitions obstruent l’existence de remplissages symplectiques [Nie06] et garantissent l’existence d’orbite périodiques contractiles pour tout champ de Reeb [AH09]. Elles impliquent aussi une trace de flexibilité potentielle, à savoir l’annulation de l’homologie de contact [BvK10]. Presque par définition, toute structure de contact peut être modifiée à l’intérieur d’une boule pour devenir vrillée au sens de Giroux. Ce résultat est beaucoup plus délicat, mais vrai aussi, pour la définition de Niederkrüger [NvK07].
Ce document a été traduit de LATEX par HEVEA