
Vous trouverez les fichiers sur i2geo.
Une matrice 2x2 s’applique sur des vecteurs du plan muni d’un repère. On définit une matrice $M$ par l’image de deux vecteurs indépendants, par exemple les vecteurs de base $e_1$ et $e_2$, qu’on manipule à la souris ou dans le tableur.
Les valeurs propres sont les racines du polynôme caractéristique $\det(M-X\,\text{I}_2)$. Elles sont réelles quand un certain discriminant est positif. Les directions propres associées sont des droites de directions dilatantes pour $|\lambda|>1$, ou contractantes pour $|\lambda|<1$, avec une réflexion si $\lambda<0$. On comprend l’intérêt de la notion quand on itère l’application linéaire.
Implémentation
On ouvre le tableur et on met des nombres dans A1:B2 pour coder la matrice M. On sélectionne ces 4 cases, puis clic-droit et Créer une matrice, qu’on nomme M. On crée un texte formule LaTeX quelque-part contenant
"M=\left(\begin{array}{}" + A1 + "&" + B1 + "\\" + A2 + "&" + B2 + "\end{array}\right)"Puis on crée les deux vecteurs $M e_1$ et $M e_2$ par
M1 = (A1,A2)
Vecteur[M1]
M2 = (B1,B2)
Vecteur[M2]ainsi les entrées du tableur sont manipulables à la souris.
On crée un point puis son image par M, A=(1,1) (par exemple) puis A’=M*A (l’application d’une matrice sur un vecteur est implémenté par la multiplication d’une matrice par un point) et les vecteurs associés Vecteur[A], Vecteur[A’]. Manipuler A pour voir A’ bouger, comprendre ce qui se passe.
La combinaison linéaire peut être mise en lumière par le tracé des vecteurs xa=Vecteur[(0,0),(x(A),0)] ya=Vecteur[(x(A),0), A] ainsi que leurs images M*a et M*b. Attacher ces objets à une case à cocher pour les cacher.
La suite des itérés est intéressante, on peut mettre dans le tableur, disons en colonne F : F1=A puis F2=M*F1 qu’on généralise sur la colonne. On cache les points, qu’on visualise par des segments : G2=Segment[F1,F2] qu’on généralise à la colonne.
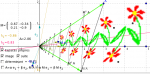
On peut illustrer encore mieux ce concept d’itérations en créant trois points (copier-coller la colonne F en colonnes K, L et M) qui vont être les coins d’une image. Je n’ai pas trouvé de moyens de faire autrement que de replacer 4 ou 5 fois manuellement une image par l’interface graphique et d’attacher ses coins. Pour créer une image le jour de l’examen, vous pouvez créer une image en prenant la trace de plusieurs points libres colorés et en demandant à Géogébra d’exporter la figure sous forme d’un petit PNG, qu’on peut ensuite insérer plusieurs fois manuellement.
Le comportement de cette suite dépend si la matrice est diagonalisable ou pas et des éléments propres de la matrice, déterminés par le discriminant ∆=tr^2-4*det où det=A1*B2-A2*B1 et tr=A1+B2. On affiche tous ces nombres près de la matrice.
Le déterminant det est la surface du parallélogramme défini par M1 et M2. On peut visualiser cela en traçant le Polygone[(0, 0), M1, M1 + M2, M2] dont on peut mettre les couleurs avancées à Rouge si le déterminant est négatif et Vert sinon, soit dans l’onglet Avancé, Rouge : Si[det < 0, 1, 0] et Vert : Si[det > 0, 1, 0] On peut parfaire en positionnant le texte "det="+det au point (à créer) (M1+M2)/2 centre du polygone. C’est aussi le produit des valeurs propres quand la matrice est diagonalisable.
Quand le discriminant ∆ est positif, les racines du polynôme caractéristique sont obtenues par L1=Racine[x² - x tr + det] qui crée une paire de points (retrouver le second et le renommer L2), qu’on cache et qu’on transforme en nombre réel par l1=x(L1) l2=x(L2) et qu’on affiche (de deux couleurs différentes) par la formule LaTeX "\lambda_1=" + l1 .
Les droites propres sont définies par la formule (attention, il faut s’en souvenir, elle n’est pas si immédiate à retrouver mais il faut savoir la retrouver) :
E1=Droite[(0, 0), (B1, l1 - A1)]
E2=Droite[(0, 0), (B1, l2 - A1)]qu’on met de la même couleur que le texte affichant chacune des valeurs propres.
Observer que A "rattrape" A’ quand la matrice est diagonalisable (à valeurs propres positives, sinon c’est son symétrique) le long des droites propres. Quand la matrice n’est pas diagonalisable, A "court après" A’ sans jamais le rattraper.
On peut définir l’exponentielle de la matrice M en créant un curseur u (de -3 à 3) et
I_2={{1,0},{0,1}}
expuM=I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M*(I_2 + u*M/12) / 11) / 10) / 9) / 8) / 7) / 6) / 5) / 4) / 3) / 2)Astuce : copier I_2+u*M*()/ et le coller dans les parenthèses de manière répétée.
Cette écriture de Hörner de la série de de Taylor tronquée met en jeu peu de multiplications. Attention que pour u tendant vers $-\infty$, l’exponentielle tend vers 0 si ses valeurs propres sont positives, mais un polynôme ne peut pas se comporter de cette façon et tend vers l’infini avec u, donc on a des artefacts de la troncature pour u grand.
On peut comparer à d’autres formulations qui souffrent moins de ce problème comme
expuMM=(I_2 + u*M / 12)^12
expuMM2=((I_2 + u*M / 24)*Inverser[I_2 - u*M / 24])^12car, par ordre croissant de précision à degré fixé, $\exp(u)$=$\sum_{k=0}^\infty \frac{u^k}{k!}$=$\lim_{n\to\infty}(1+\frac u n)^n=\lim_{n\to\infty}\left(\frac{1+\frac u {2\,n}}{1-\frac u {2\,n}}\right)^n$.
Une manière économe de comparer les précisions est de faire afficher le déterminant de chacune de ces trois matrices et de les comparer à exp(u*tr) qui est le déterminant de $\exp(u\,M)$=$P^{-1}\exp\left(\begin{array}{cc}u\,\lambda_1&0\\ 0&u\,\lambda_2\end{array}\right)\,P$=$P^{-1}\left(\begin{array}{cc}\exp(u\,\lambda_1)& 0\\0&\exp(u\,\lambda_2)\end{array}\right)\,P$.
Commentaires